Synergy 7.1: Platooning Concept Transfer Report
The word platoon has its origins from the french word peloton, which refers to a group of cyclists in particular the main mass of cyclist riding in some kind of formation in the race. Platoon in the army refers to a principal subdivision of a military unit. The benefits of increased efficiency, minimising human errors and safety advantages are some of the main drivers for implementing this technology for various vehicles (such a drones, army vehicles, public and private transport). Insects, birds and fish display collective behaviour that is based on each member’s localised knowledge and interaction with its neighbours. The aim of this report is to expand the platooning concept. At the moment, platooning of CAVs is understood as a formation of vehicles where there is one lead vehicle and following vehicles that communicate with each other. This allows the vehicles to move more efficiently (reducing drag and having less unnecessary accelerating and breaking compared to human drivers) and safely as it eliminates human error, which is the main cause of traffic accidents. In this report we will look into the origins of platooning as a term in order to understand the origins of the concept. Then we will look into nature and human-made formations and methods that display similar characteristics to platooning and how they have been applied in other areas. At the end, we will provide our observations and comments to how the platooning concept for CAVs could potentially be expanded further. Herds of animals, fish schools, and flocks of birds are characterized by an aggregate motion, main characteristics of which are:
• Autonomy
• Distributed Functioning
• Self-Organising Capacities
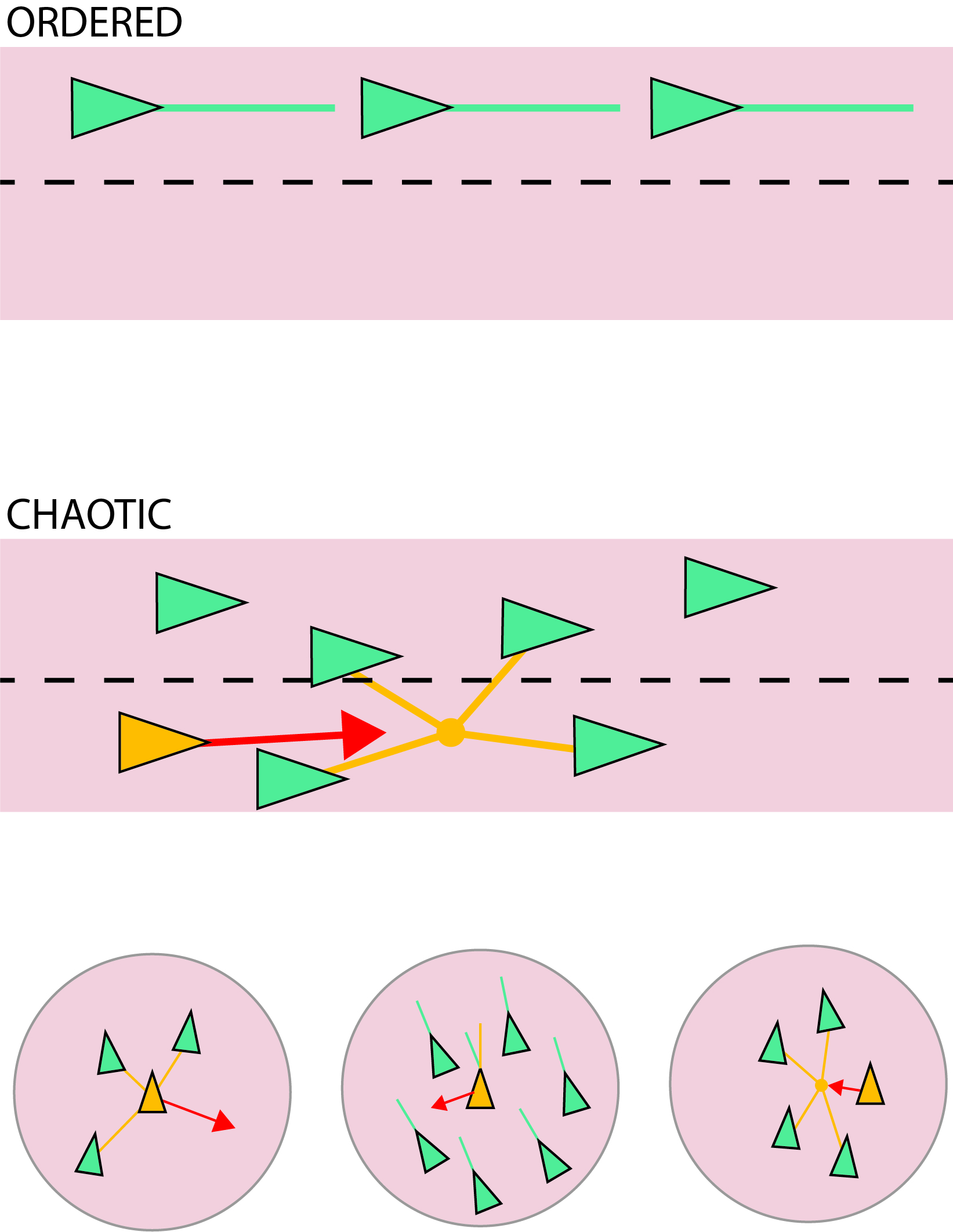
Flocking and Swarming are behaviour models that have been studied and applied to crowd modelling, computerised problem solving, AI, swarm robots and unmanned vehicles. Our research so far into platooning in nature does not indicate a need for a conventional leader. Although the idea of a lead car is in some ways warranted in an autonomous vehicle system, must that leader be predefined? The question arises as exploration into natural systems saw leadership of a flock of birds or ants / bee movement being shared among all members of the group. We offer behaviour patterns as an alternative to existing leader following structure of platooning CAVs.

